

2017 045447号 地図生成方法 自己位置推定方法 ロボットシステム およびロボット Astamuse
2
自己位置推定がなぜ自動運転において重要か Qiita
2

2020 177289号 情報処理装置 情報処理方法及び情報処理プログラム Astamuse
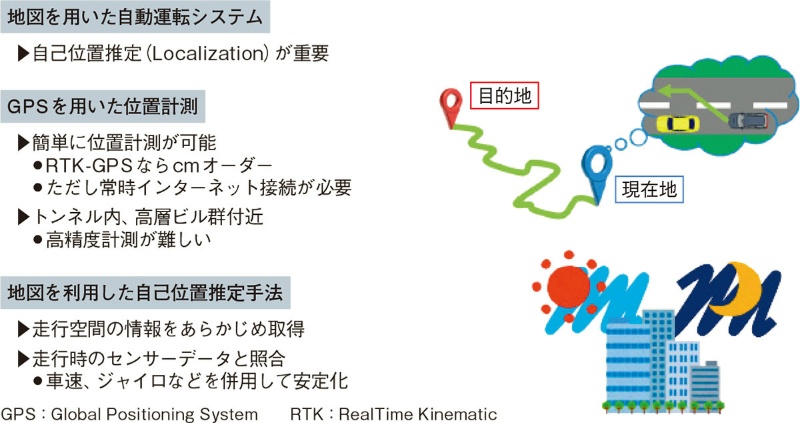
自動運転車はこう作る 2 センサーフュージョンで能力向上 日経クロステック Xtech
2
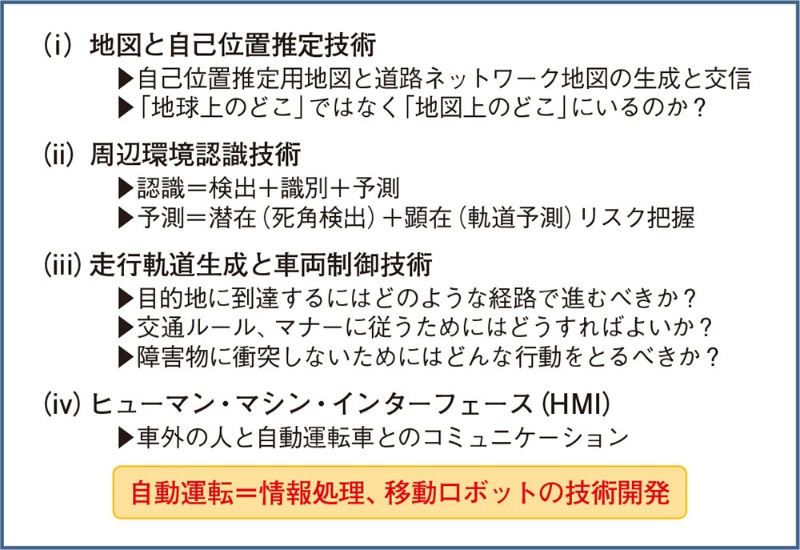
自動運転車はこう作る 2 センサーフュージョンで能力向上 日経クロステック Xtech
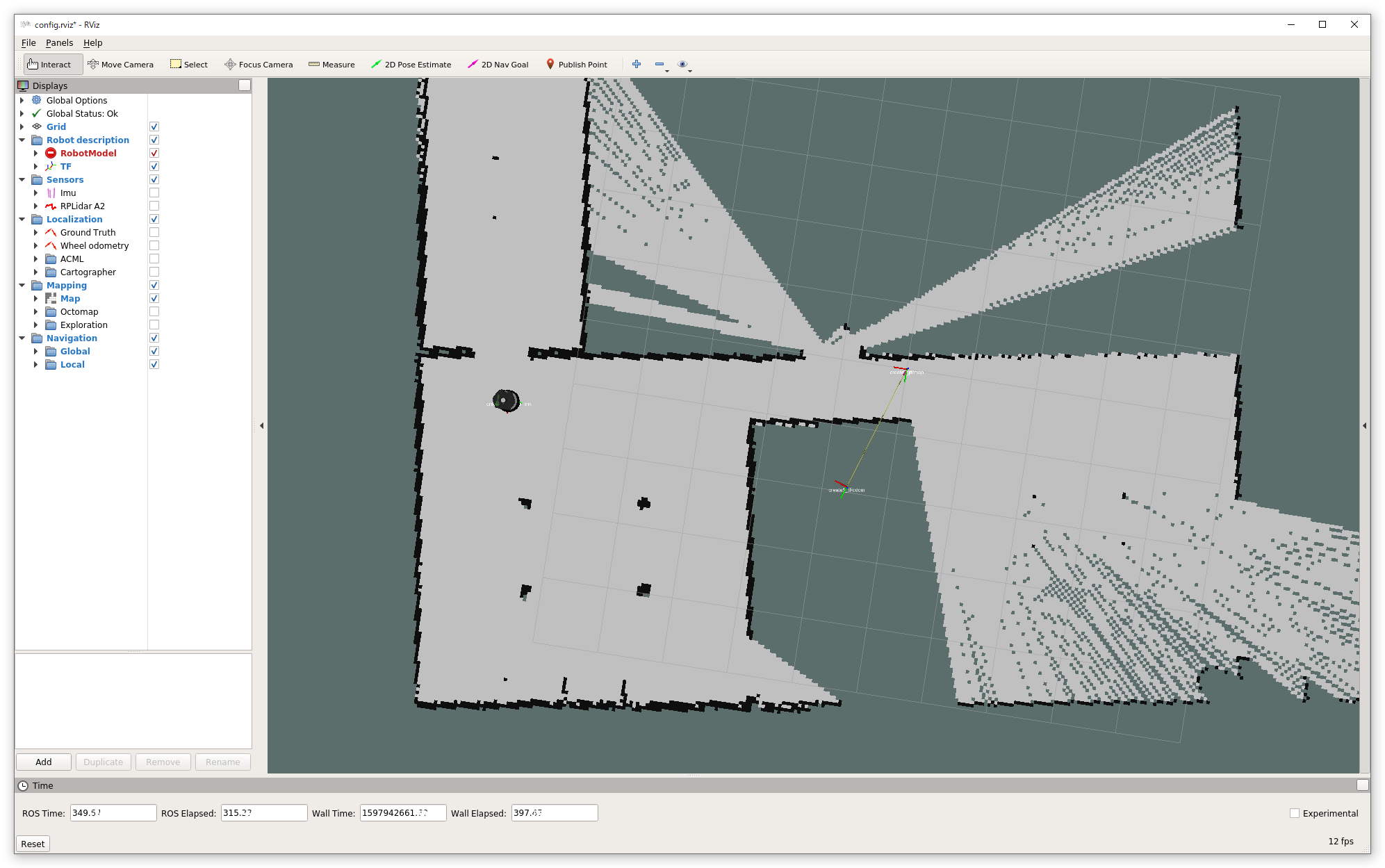
Hard2020 シミュレータでの地図作成と自己位置推定 Demura Net
環境埋め込み情報に基づく自律移動ロボットの自己位置同定

Rosのslamを使った地図作成とナビゲーション

Tags:
Archive





